Implementing a location tracking system based on ultra sound waves, for indoor use
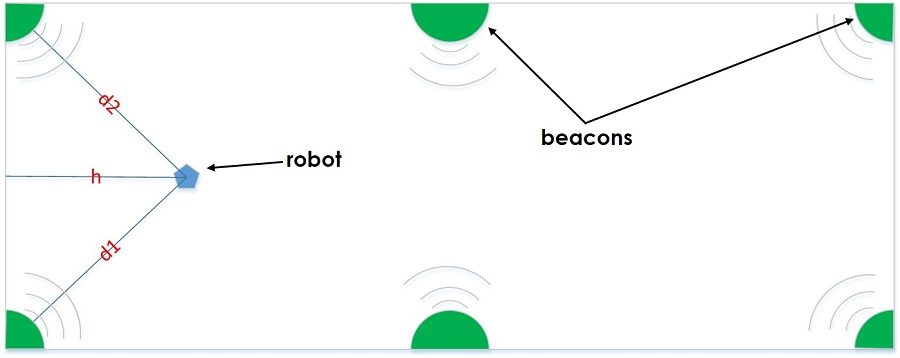
Ultra sound positioning system using Intel Galileo. 6-8 beacons and one mobile robot. Each beacon sends an ultra sound signal to the robot. Distance is calculated by time of flight. And coordinates calculated with triangulation.