System controller for a spaceship, that should detect a pre-selected target - a space station, and reach to it.
At first, the spaceship is scanning the area. Then, when the target is on camera’s field of view, the spaceship will move so that the target object is in its center.
In the next stage, the spaceship will move to a parallel position to the target, using the angle sensor.
At the end, in the final stage of the algorithm, the spaceship will move forward directly to the target.
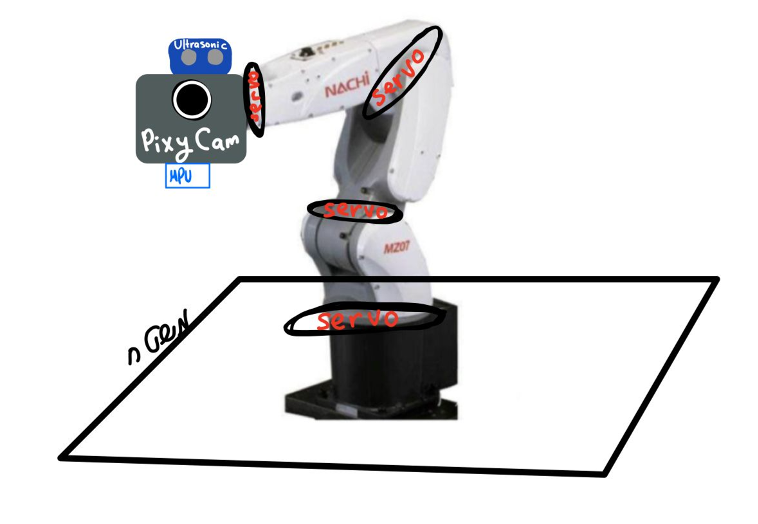
The system consists of:
- Robotic arm
- camera PixyCam2 for object detection
- Distance sensor ultrasonic for distance measurments
- Angle sensor MPU6050
- Servo motor for the robotic arm movement
- esp32 for SPI communication between sensors and FPGA
High level block diagram:
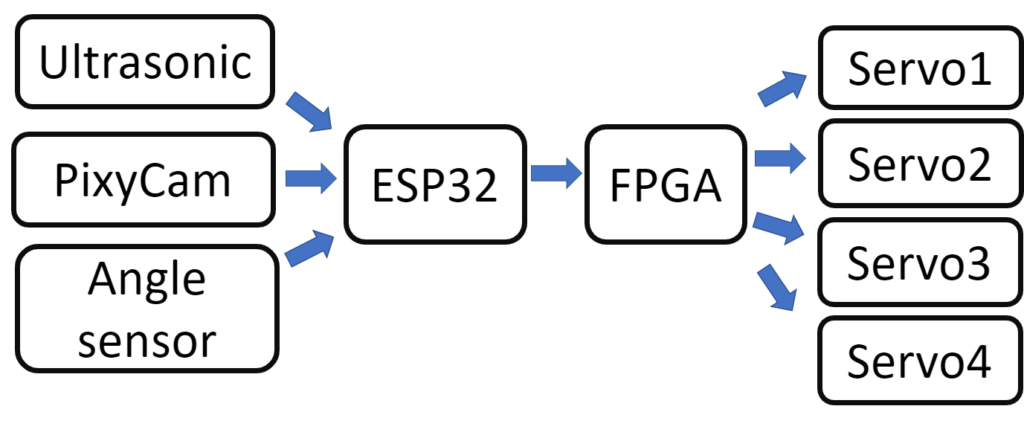
![]()