The project developed a smart fishing buoy that integrates an ESP32-based control system with motion sensing, camera monitoring, and a servo-driven hook mechanism to reliably detect and respond to fish bites while distinguishing them from wave motion.
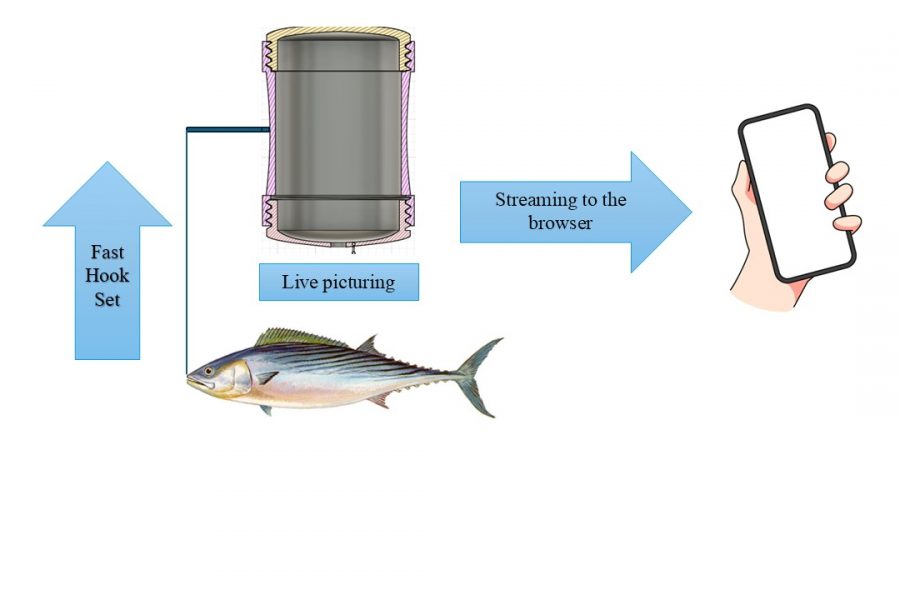
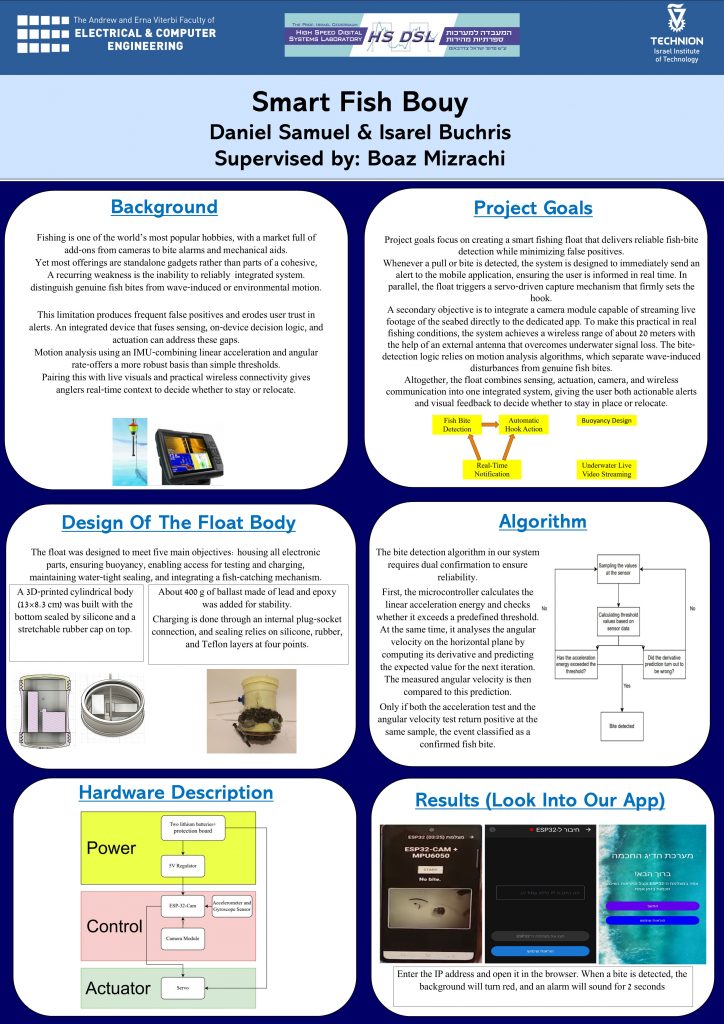
The aim of this project was to develop a smart fishing buoy that increases the likelihood of successful fish capture. The float is designed as a sealed cylindrical body that integrates a mechanical mechanism, electronic components, and sensors. When a fish bite is detected, a mechanical lever connected to the fishing hook is activated rapidly to ensure proper hooking. The control system is based on an ESP32 microcontroller connected to an accelerometer/gyroscope sensor and a camera, with a dedicated algorithm for distinguishing bite patterns from normal wave motion. Actuation is performed by a servo motor powered by two batteries in series, while a DC-DC converter provides the regulated supply voltage for the controller. The integration of the detection algorithm, electronics, and physical design creates a reliable and unified solution for fish capture.
During development, sea trials were conducted to characterize wave motion and distinguish it from fish bites. Multiple mechanical alternatives for actuating the hook were evaluated, with the servo-based design chosen for its reliability and durability. In parallel, electrical measurements were carried out to characterize the power components and verify current requirements under load. The combination of these three processes – wave characterization experiments, evaluation of mechanical alternatives, and circuit testing – enabled us to achieve a final design that meets the requirements for sealing, stability, and fast response.