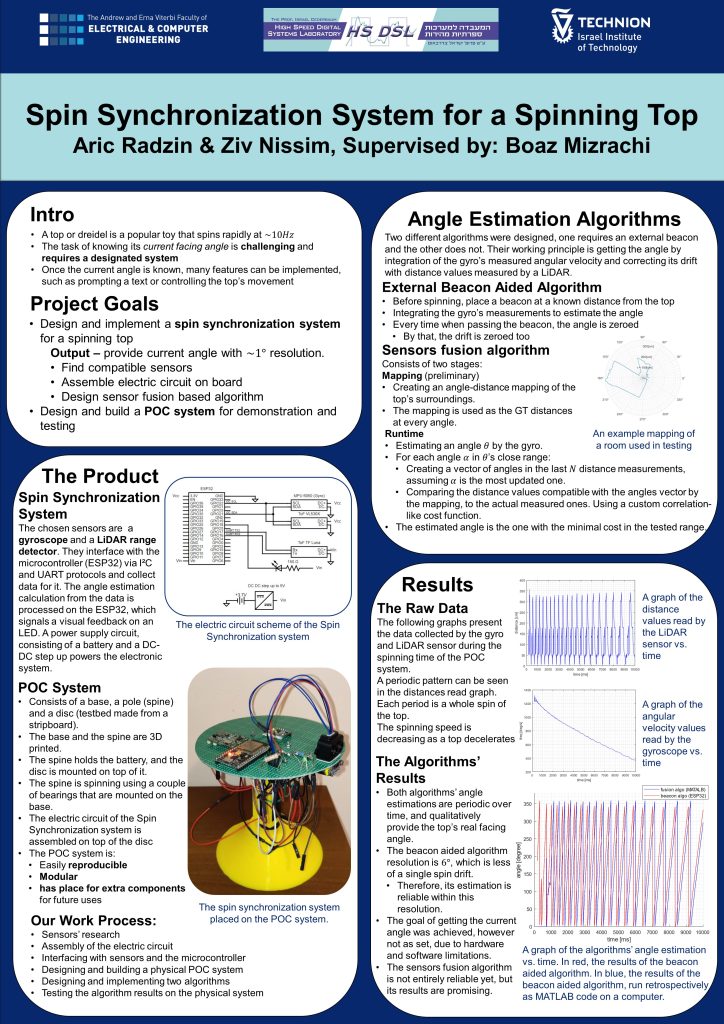
A top (aka dreidel) is a common toy which spins rapidly. The main goal of the project is to design and implement a synchronization system for such a top. i.e., a real time system to indicate the current angle that the top is facing while it is spinning. This solution it to later be used to synchronize different operations.
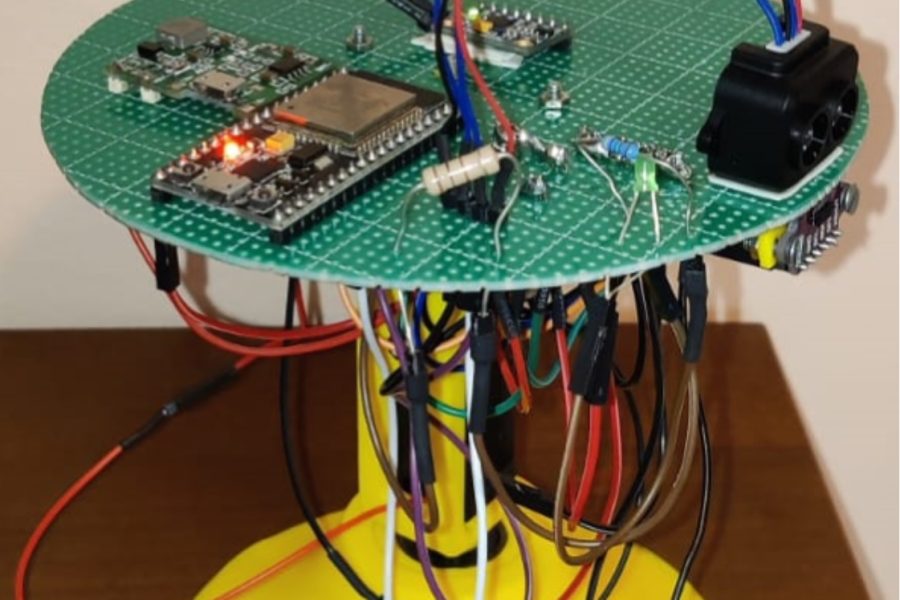
This project’s output is such a system, consisting of several sensors and a microcontroller. The sensors collect data from the top’s surroundings. A dedicated algorithm runs on the microcontroller and estimates the top’s current facing angle (yaw).
The work on the project included building up the testing system from scratch, starting with a market survey of different sensors, assembling the system, wiring an electrical circuit, and eventually making a physical prototype for testing, designing, and coding the algorithm.
The final products are a prototype of rotating disk that carries the synchronization system, a real time algorithm (written in C++) that estimates the current angle successfully and an offline version of it (written in MATLAB), for exploring new features and debugging.