This project took a specially designed board and implemented on it a Kalman-Filter based algorithm for merging GPS and INS positioning data and outputting a highly accurate and frequently updated position solution. The report gives some background theory needed for understanding, show the proposed algorithm and implementation and gives a brief results review.
In today’s modern-life (and in light of the future expansion of the Internet Of Things) there is an increasing need for high accuracy and low cost positioning system. Our modern devices uses mainly GPS for finding their location. This global positioning system, while low-cost and easy to use, isn’t accurate enough and has a low updating rate. However, there is a wide set of low-cost sensors (such as accelerometers, gyroscopes, magnetometers, etc.) that can help make the system highly accurate and frequently updated.
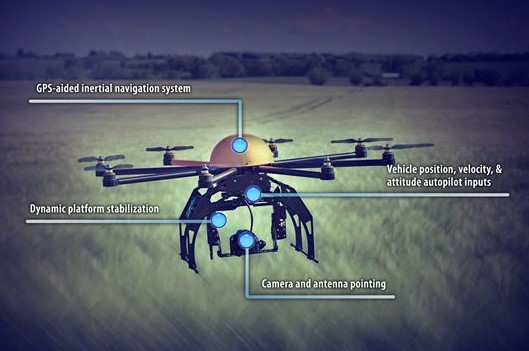
This project was aimed at implementing such a system that combines GPS and INS using a simple Kalman Filter on a pre-made low-cost PCB.
The report includes the needed background theory for understanding the coordinate system used (Longitude-Latitude-Height, Earth-Center-Earth-Fix, East-North-Up and Roll-Pitch-Yaw) and the basic work method of the Kalman Filter (An iterative algorithm design to filter noisy data based on known system parameters and behavior).
After understanding the background, it will show a proposed algorithm for the combination of both system’s positioning output into a single filtered output. And an algorithm for the total module. The algorithm is tested in Matlab (Results included) and implemented using TI’s Code Composer 6 IDE.
Later on the report describes an efficiency block arrived while implementing, and the solution used for the project.
Finally, the results are shown and discussed, and future development and conclusions are given.
