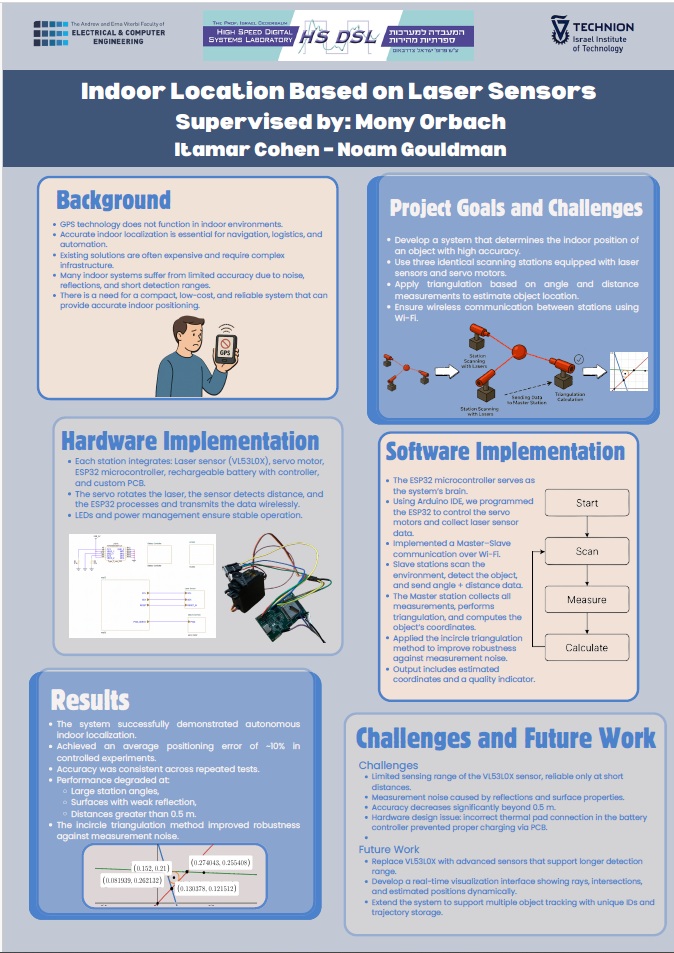
The project presents a laser-based indoor localization system designed to overcome the limitations of GPS in enclosed environments. By deploying three ESP32-driven scanning stations with rotating laser sensors, the system achieves precise object positioning through wireless communication and triangulation.
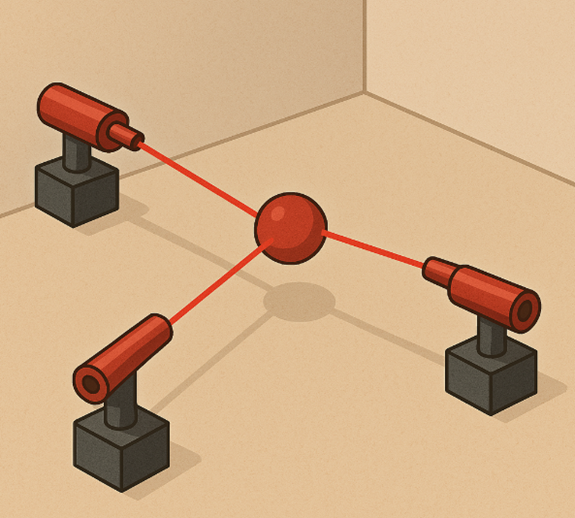
Accurate indoor localization is a critical challenge since GPS signals cannot be reliably used inside buildings. This project introduces a laser-based triangulation system that determines the exact position of an object in indoor environments. The system is built around three identical stations, each equipped with an ESP32 microcontroller, a VL53L0X laser distance sensor mounted on a servo motor, and a custom-designed PCB integrating power management and wireless communication modules.
Each station performs a horizontal laser sweep to detect objects, recording the corresponding angle and distance. These measurements are transmitted via WiFi to a central master station, which collects data from all stations and applies geometric triangulation using the incircle method to estimate the object’s coordinates. The system was evaluated in controlled experiments, achieving an average error of approximately 10% in position estimation. Results highlight both the effectiveness of the triangulation approach and the limitations of short-range sensors, particularly when dealing with weak reflections or large distances.
This project successfully demonstrates the feasibility of autonomous indoor localization using compact and cost-effective components, while integrating hardware, software, and algorithms into a robust and efficient system.