Identifying the sensor plane of installation of an accelerometer within a moving vehicle.
Using car data and “Road DNA” to facilitate a simple installation solution.
Develop an algorithm and implement a Java solution for integrating multiple sensors.
In this project we present our proposed solution for the problem of detecting the plane of installation of a 3-axis accelerometer. It is meant to perform in conjunction with multiple other sources of input data. The desired output is the correct orientation of the accelerometer within the vehicle in which it is installed.
The input data is produced by multiple sensors and includes kinematic and mechanical data about the vehicle as well as prerecorded data about the road traveled. The required output is the Euler angles which translate the plane of the IMU (Inertial measurement Unit) to the plane of the car. Additionally, an estimate of the accuracy of the results is important.
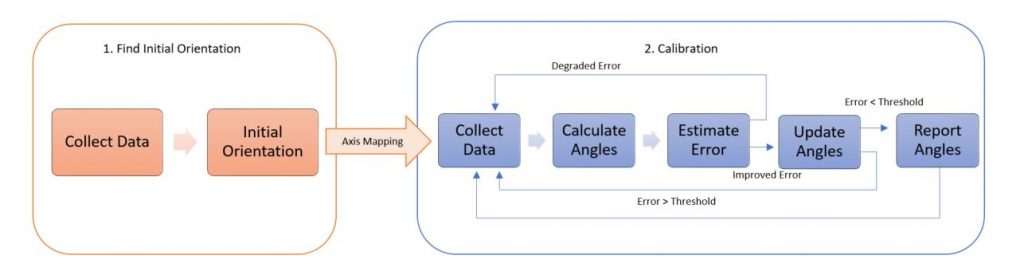
We used data from other sensors that theoretically should have similar behavior to acceleration vectors. The algorithm we implemented attempted to enhance these similarities to fit our physical model. A good fit indicates valid calibration of the coordinate systems. We implemented an iterative algorithm that gradually converges on the required angles while minimizing the loss that represents discrepancies with our model.
The algorithm was implemented in Java along with an environment that enables an easy and visual development process.