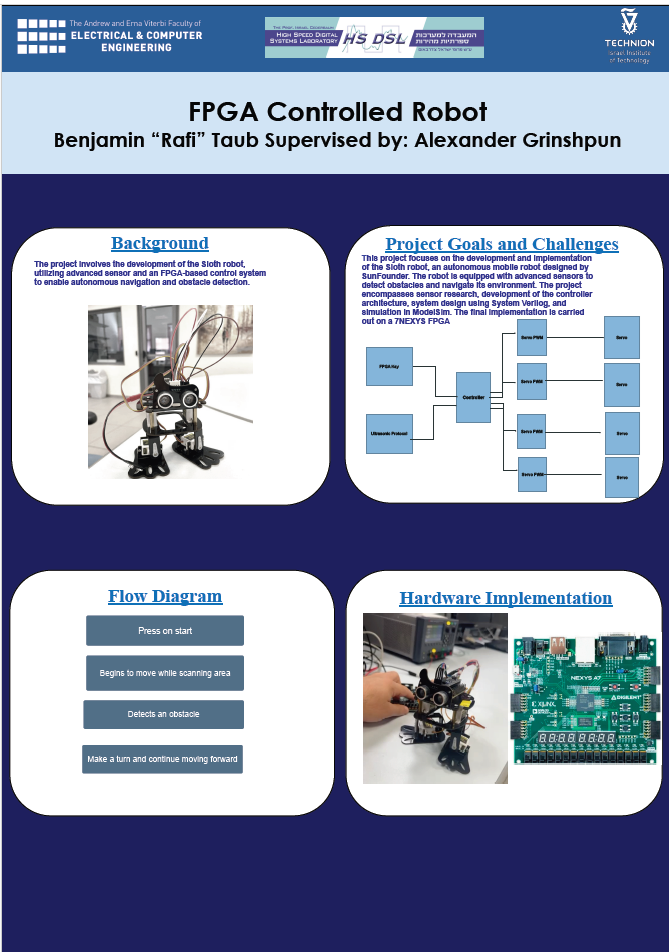
The project is based on a robot called Sloth, developed by SunFounder. Sloth
can move forward and detect the range to make a turn when encountering an
obstacle.

The project focuses on the Sloth robot, developed by SunFounder, and its
advanced capabilities to move and respond to its environment.
Sloth is equipped with an advanced sensor system that allows it to move
forward autonomously and detect obstacles in its path. When the robot
encounters an obstacle, it can measure the distance to the obstacle and decide
on the appropriate turn direction to continue its movement without collision.
The project involves designing and building the robot, integrating the sensors,
and programming it for operation. Through the project, advanced technologies
in robotics, signal processing, and mathematical computation of distances and
angles are explored.