A low power and low-cost prototype for a community cats feeder. It consists of different sensors and hardware, and an object detection algorithm, that will detect cats and avoid other animals.

This project’s goal is to build a community cats feeder that will feed community cats, and avoid feeding other wild animals, in order to deal with the municipality’s rules about feeding community cats.
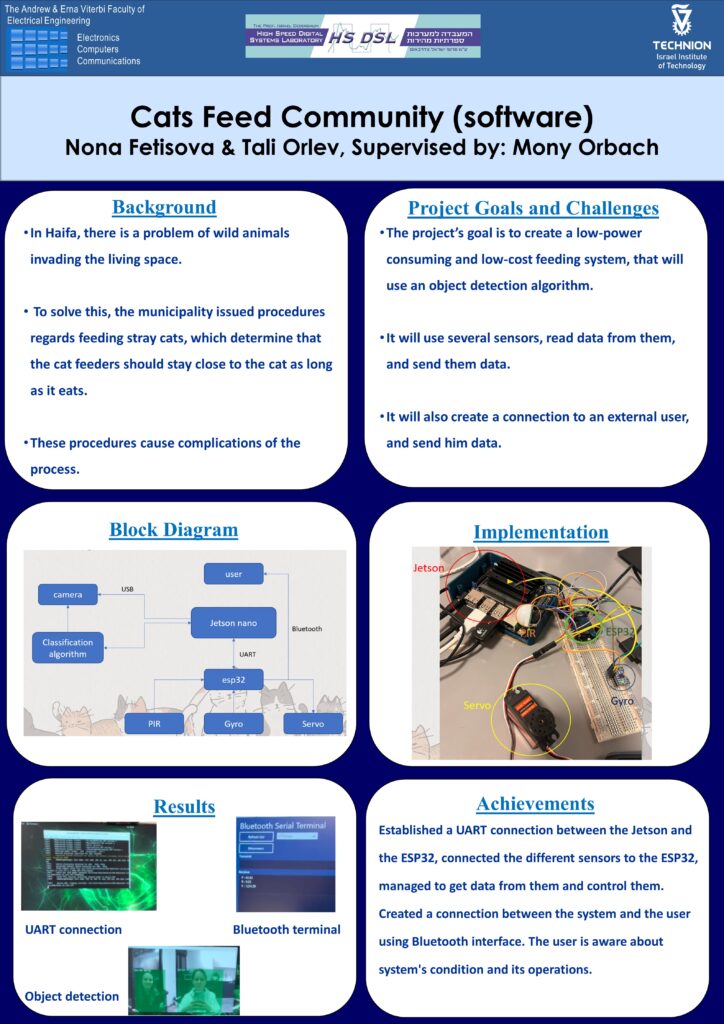
The project consists of several sensors and hardware. First, it has the Jetson Nano – a small and powerful computer that lets you run multiple neural networks. Second, it has the ESP32 – a system on a chip (SoC) microcontroller that connects between the Jetson and the other sensors.
In addition, the sensors that are used in the projects are PIR – a sensor that can detect movement, the gyro sensor, that senses angular velocity, and the servo motor – to rotate the door of the station when needed.
Another part of the project is the object detection algorithm, which uses a live camera stream and detects all the objects that are seen in the frame.
It also has a Bluetooth connection to an external user, and can send data and information to the user.
The station detects movement, uses a web-cam to search for a cat in the frame, and if it found one within 10 seconds, it opens the door and lets the cat eat.