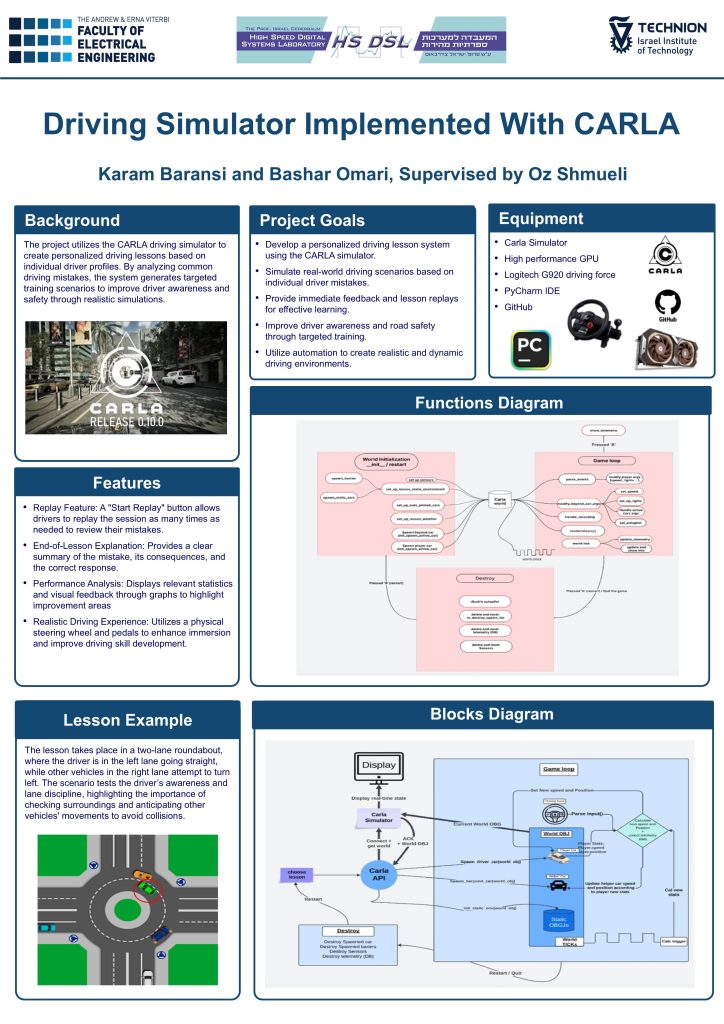
Personalized driver training system using the CARLA simulator. By analyzing a driver’s profile, which includes the driver’s common mistakes, the system generates tailored driving lessons that simulate realistic scenarios, helping drivers recognize and correct their weaknesses through practical experience and replay-based feedback.
The project integrates driver behavior analysis with simulation-based training to create personalized driving lessons tailored to individual weaknesses. As part of a larger system that identifies and categorizes driver mistakes, this project focuses on transforming those insights into interactive driving lessons using the CARLA simulator.
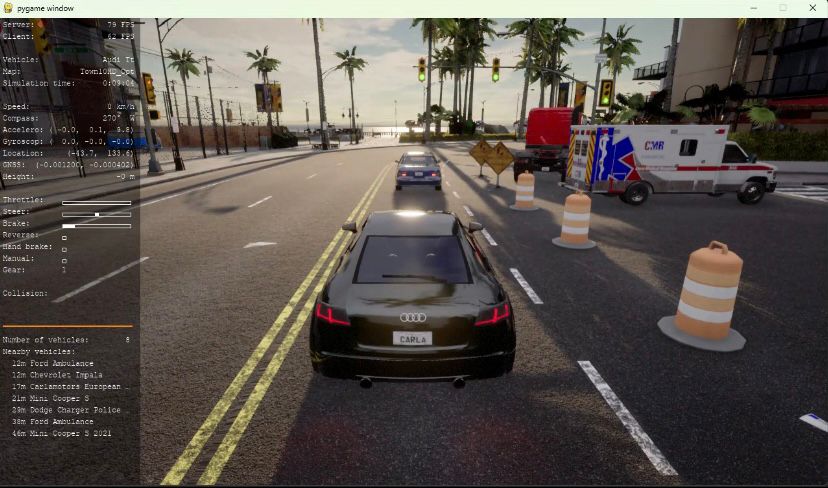
The system generates realistic driving scenarios based on the driver’s profile, which highlights common mistakes such as failing to maintain a safe following distance, inadequate awareness in poor weather conditions, and improper lane management in roundabouts. Each lesson is designed to immerse the driver in a situation where their identified weaknesses could lead to a potential accident. The lessons provide immediate feedback, and at the end of each session, a replay feature allows the driver to review their actions and understand how to improve their responses in similar real-world situations.
To ensure accuracy in scenario execution, the project leverages CARLA’s built-in functionalities, including an autopilot mode for non-player vehicles, allowing them to move naturally within the simulation. Additionally, a user-controlled replay system was implemented, giving the driver the flexibility to review mistakes at their own pace. The simulation is further enhanced by the use of a real steering wheel and pedals, providing a more immersive and realistic driving experience.
By providing an immersive and adaptive training experience, this project contributes to safer driving habits, helping individuals recognize and correct their mistakes before they translate into real-world accidents.