This project's goal was to built a system based on ESP32 and Android application, that sends notifications between vehicles, which are not in each other's line of sight, as well as collecting data on driving. The application is able to present graphical data to the driver.

Today, there are technological devices in vehicles, whose purpose is to prevent road accidents.
These devices are based on visual sensors, and are incapable of warning of what is not within their line of sight.
In this project we built a system that allows warning of emergency braking, start drive and risk driver from a vehicle that is not within the immediate sight of the driver.
The system is built up of sensors connected to each other, with each system installed in a different vehicle.
The system contains an application that is connected by Bluetooth to the HW system, in order to present data on the phone’s screen.
The system is the same among all vehicles and its function is to send notifications, as well as receive alerts from other vehicles.
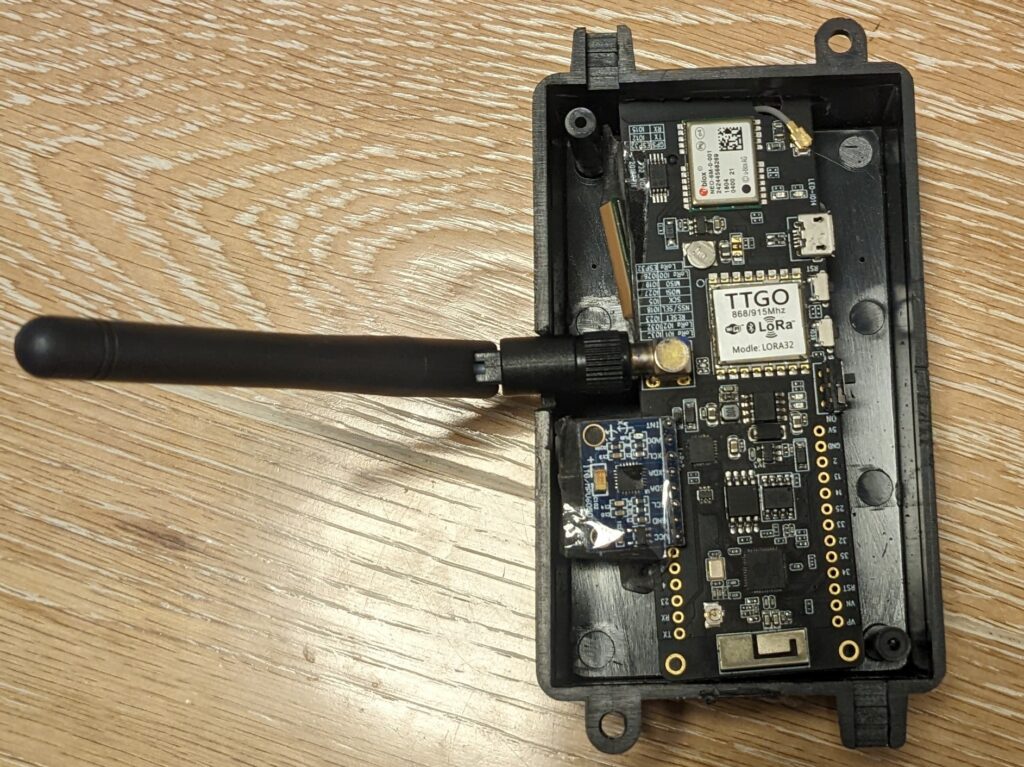
The system is a stand-alone device, and it can be installed in any vehicle.
When there is a drivig event, an alert will be sent from the braking vehicle to all vehicles in the near area.
The alert will include information about the location and direction of movement of the sending vehicle.
Vehicles that receive the alert, enable to decode the sent alert, and signal to the driver to take action, only if they are in the relevant range and direction of movement.
The system is Arduino based, based on a programmable board, ESP32, and a several of sensors with suitable interface to the board.
The application is based on the environment of MIT App Inventor.
The apllication can show 4 types of statistics graphs: Trip Duration, Trip Distance, Average Speed, Accumulated Penalties (for risk drivers).
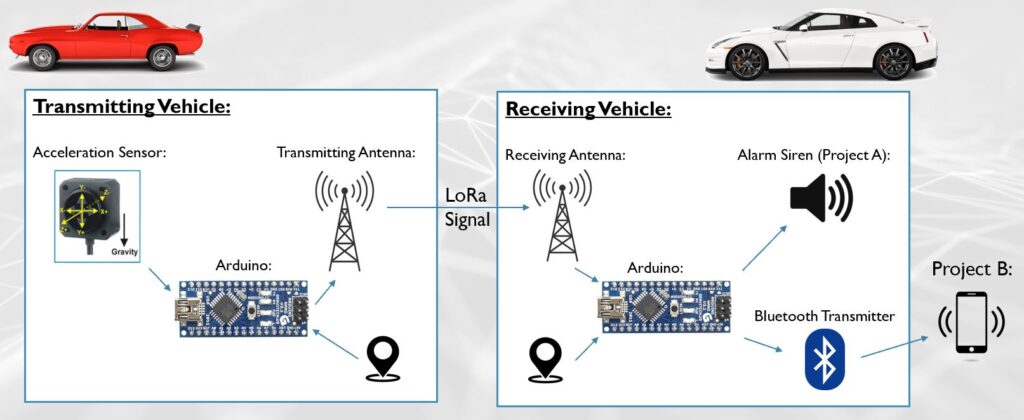
The first indication that initiate the system operation is obtained from the application, then the acceleration sensor starts sensing, whose purpose is to measure the vehicle’s movement.
If it detects an event, it transmits a signal to the board for further processing.
At this point, a GPS component transmits data of the vehicle’s location, direction of movement and speed to the board.
The board sends an alert by a LoRa communication component to the other vehicles in its near area.
The rest of the vehicles in the relevant range will receive the alert using the communication component.
Then, it will calculate the range from the transmitting vehicle by comparing its own coordinates to the transmitted ones.
If needed, a signal will be sent to the application. and then a notification will be presented on the driver’s screen.