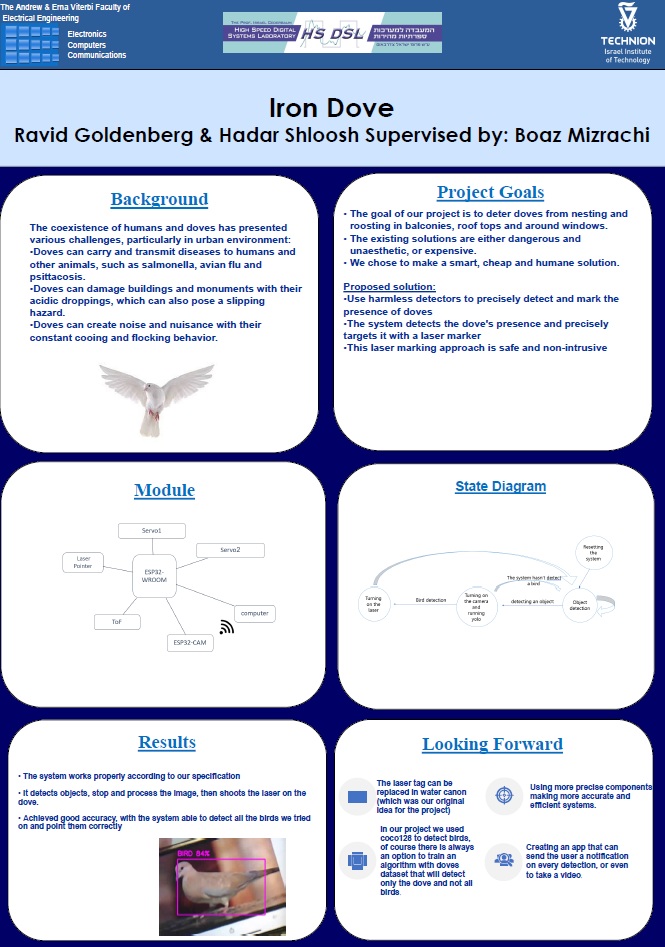
This project aims to develop an automated system for detecting and deterring doves in urban environments using computer vision and laser technology. The system employs an ESP32-based camera module with YOLO object detection to identify doves, and uses servo motors and a laser pointer to track and harmlessly encourage the birds to relocate, addressing the challenges of dove-related health risks and property damage in a humane manner.
The “Iron Dove” project addresses the challenges posed by doves in urban environments through an innovative, automated deterrent system. At its core, the system uses an ESP32 module coupled with YOLO (You Only Look Once) object detection algorithm to identify doves with high accuracy. A VL53L0X Time-of-Flight distance sensor enhances efficiency by triggering the camera only when objects are detected nearby.
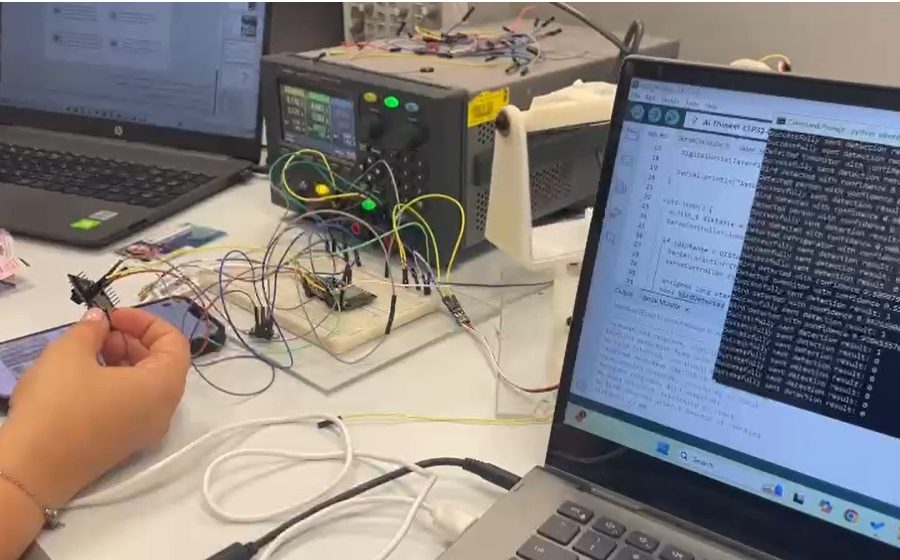
Upon dove identification, the system employs Parallax Feedback 360° High-Speed Servos to aim a low-power laser pointer, serving as a harmless deterrent. The entire system is managed by a combination of ESP32-WROOM and ESP32-CAM modules, handling sensor data, motor control, and wireless communication.
Integrating various hardware components and utilizing protocols such as I2C and UART, the Iron Dove system demonstrates a sophisticated approach to urban dove management. It offers an effective, automated solution that balances technological innovation.h urban dove populations in a humane manner.