Design and implementation of a control system for MEMS gyro while aiming for a mixed-signal
ASIC implementation.

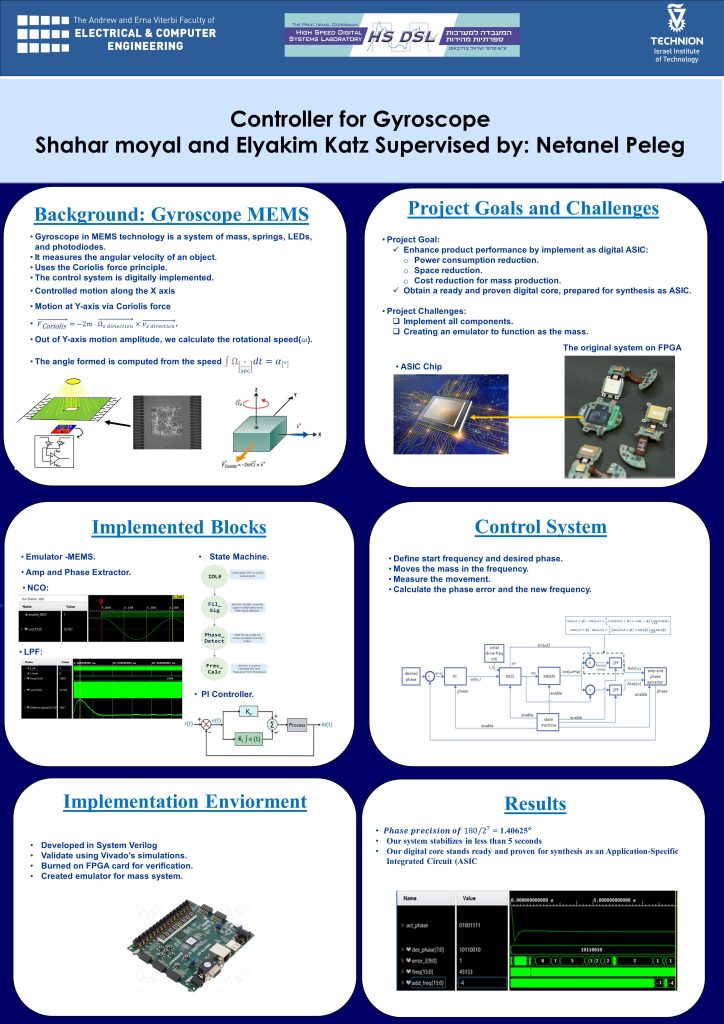
The main objective of the project was to improve parameters with consideration of high volume production in mind. That is parameters such as cost, energy consumption, physical dimentions and thermal efficiency.
This was achieved by transitioning from the current system, implemented on an FPGA card, to a digital chip.
To accomplish this, each block we developed was written in SystemVerilog. The validatation was achieved using the Vivado software and functionality verification was achieved by programming it onto the Xilinx Artix-7 card. This process was essential to demonstrate the feasibility of implementing a circuit on a digital chip.
The developed blocks include:
1. NCO.
2. MEMS.
3. Amp and Phase Extractor.
4. PI Controller.
5. LPF.
6. State Machine.
7. Emulator – to simulate the existing MEMS system
After checking each block, the next step was integration in two stages:
1)Phase Detection Circuit:
At this stage, the accuracy of the measurement circuit of the phase difference between the signal from the NCO and the signal from the MEMS was tested
2)Full System:
At this stage the system was built in its entirety and its ability to stabilize at a desired phase difference was verified
This project successfully developed an improved system with high resolution (1.4 degrees),
fast settling time (5 seconds), and high production efficiency, utilizing an efficient digital chip.