The AUV Emergency System project is about designing the firmware which role is to monitor the state of the elctronic chamber all the time.
In case one of the critical features does not operate within it's normal values , The firmware takes care of releasing a weight and float the AUV, in addition to starting a flash and a beacon to make the searching of the submarine more easy.
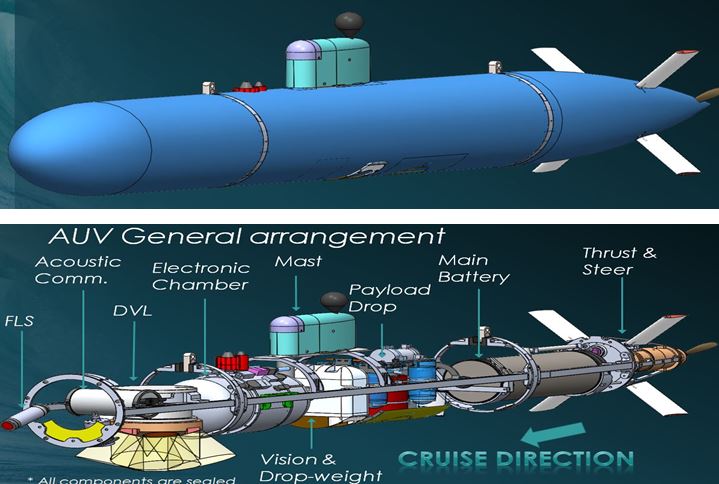
The main purpose of the AUV is to be able to get from point to point and drop a payload in a specific location.
The Emergency System is critical in the aspect of safety and economic.
Because of the effort invested developing the AUV , saving the submarine is more important then the success of the mission. This is the
reason the emergency system is so important.
The system is based on hardware and firmware because of safety reasons. more specifically it is based on two main components.
max3000A cpld which is in charge of gathering all the monitored status of the system and decide if there is an emergency.
in that case the system makes the AUV to drop weight and float in addition to initiate a flash and beacon to make the finding of the submarine more easy.
because the CPLD is limited by it’s capabilities , we use an additional cyclone 3 FPGA which is in charge of the more complex communications, such as BMS (Battery Management System)
and ADC. the FPGA monitors this communication and report to the CPLD.
In this project we designed the firmware for both, the CPLD and the FPGA, which monitor the status of the system and decide if there is an emergency and react accordingly.